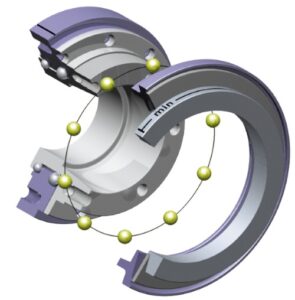
By Joyce Laird, contributing editor • Updated August 2018 by Lisa Eitel || Torque limiters are a kind of ball-detent clutch using a series of hardened balls (spring loaded into a detent plate) to clutch the load. Then the balls disengage (release from their detents) once the drive line torque reaches a value sufficient to actuate the spring set. Torque limiters are suitable for applications needing high accuracy and repeatability with rapid response to torque overload. These mechanical devices protect machinery and equipment from torque overload, resulting from malfunctions, jams, and crashes.
They come in a variety of designs — including shear pins, slip clutches, magnetic clutches, and ball-detent clutches, and more. In recent years, low inertia and zero-backlash versions have become increasingly common for servo-driven systems. That’s according to Andy Lechner, Product Manager R+W Coupling Technology.
Multi-position torque limiters are a type of high-performance ball-detent clutch. They’re particularly compact, backlash free, and capable of releasing driveline inertia much more rapidly than electronic controls would otherwise be able to react. While not all machines need them, multi-position torque limiters excel in preventing machine damage from interference or malfunctions.
The balls and detents in the clutch are arranged in a pattern that allows reengagement after overload with detents at multiple intervals — such as 30, 60, 90 or 120° — over a single rotation.

Though single-position torque limiters are more common, multi-position variations excel in certain key applications. For example, they work on very slow-speed axes where there’s no need to wait for the shaft to rotate one full turn before reengagement. This is applicable when the slow speed results from a significant mechanical speed reduction … often accompanied by mechanical advantage sufficient to cause excessive torque.
They’re also useful when a machine must start with the torque limiter disengaged. Here, the drive line stops after an overload with the balls oriented away from the detents. If there is a rapid acceleration at startup, it becomes possible for the balls to jump over their detents and fail to re-engage in time. Use of a multi-position torque limiter ensures that the balls are never far from their detents, reducing the amount of time before an opportunity to re-engage occurs.
Manual indexing is another possibility. In this situation a dial plate, or round indexing table, can be made to disengage from a back stop, and freely rotate until the next set of detents is reached.
“The two most common commercially available multi-position torque limiters include simple mechanical designs (in which the disengagement torque is set manually prior to use) and pneumatically controlled designs,” says Lechner. With the latter, spring pressure on the ball detent can be controlled remotely during operation. However, there are other uses on machine axes wherever there’s a need to disengage and reengage at a set angular interval less than 360° full rotation.
When selecting a torque limiter for a new or existing application, allow a sufficient safety factor for upward adjustment. Because their intended purpose is to protect against uncontrolled torque spikes, torque-limiter application is often on axes for which the real required peak torque for operation is unknown. According to Lechner, undersizing a torque limiter can exacerbate machine-downtime issues by preventing the machine from running at all — especially in designs with no margin left to increase the disengagement torque as needed.
As always, consult with manufacturer and their applications engineering to ensure a suitable torque limiter solution.
R+W • www.rw-america.com


Leave a Reply