

A new series of the CD® Coupling – Series A1C high performance CD® couplings features high torsional stiffness and high dynamic load capacity. These couplings provide precise positioning under high speed reversing loads without fatigue for reliable 24/7 operation. In addition, they are excellent for reversing loads and provide smooth operation at high speeds. The […]
torsional stiffness
Wind Turbine couplings deliver 100,000 Nm of torque

Zero-Max Wind Turbine Couplings are now available as an upgrade replacement for existing wind turbines and for OEM applications. These couplings easily handle torque spikes and high misalignment installations. They have composite disk packs at both ends of a center spacer for strength and generous flexibility. The composite disk packs (flex elements) allow a surplus […]
Servo Couplings Use Dampening Attributes For Vibrations
Specialist mechanical components supplier, Ondrives Ltd of Chesterfield, England have recently introduced a high quality range of servo-insert couplings into their extensive coupling range via their biggest ever catalogue, now that they have merged with sister company, Rino Industries Ltd. Typically, they are used in applications where vibrations and crushes may appear. The dampening attributes […]
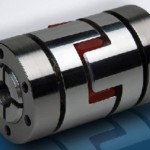
Low Inertia Aluminum Couplings Reduce Cycle Time

The aluminum CD® model is a low inertia, lightweight coupling with high torsional stiffness for servo motor applications. It is available in single and double flex versions. “We surveyed design engineers to find out what was the most desirable feature when specifying couplings for servo motor applications,” reports Robert Mainz, Zero-Max sales manager. “Low inertia […]
Floating Shaft Couplings Span Long Distances

Floating Shaft CD® Couplings are a torsionally stiff, no backlash option for connecting long distances between shaft ends. They can often be a zero-backlash alternative to Cardan Shafts. The flex element made of composite material makes it possible to have zero-backlash, high torsional stiffness and low bearing loads simultaneously. The composite material is flexible in […]
How to Properly Choose Servo Couplings
R+W Coupling Technology recently proposed a system on how to properly select your servo couplings. They state that servo systems require mechanical components with high torsional stiffness in order to perform properly in applications requiring rapid acceleration and deceleration of high inertia loads. Flexible couplings usually have the lowest torsional stiffness of any component in […]